ROV TEAM HISTORY
2022-2023: ROV ISO-Squid
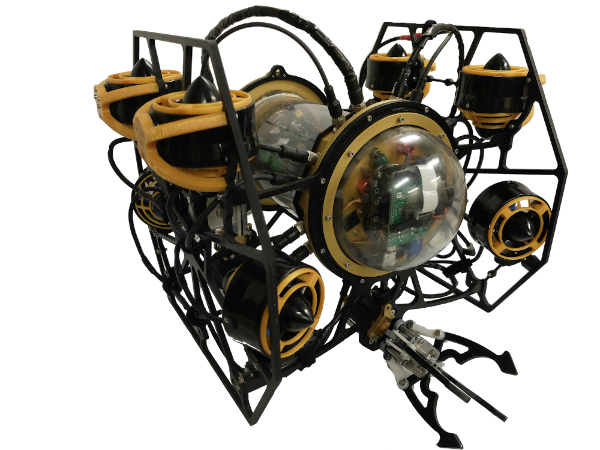
In August, 2023, Purdue ROV competed in Longmont, CO at the 21th MATE World Championship. Their robot, ROV ISO-Squid, made several innovations which distinguished it from its predecessors. First, ISO-Squid abandoned the long held two-plate frame design standard in favor of a lighter, more modular single-plate frame design. ISO-grids (for which this ROV received its name) were also cut into the base plate to further reduce the weight. Additionally, the team experimented with novel claw designs like the Rolly-PM and a robotic arm, but due to electrical integration issues, these did not make it onto the ROV in time for competition. While this ROV suffered from several integration challenges, the team was able to overcome these obstacles just in time to qualify, and they produced the most nimble ROV in IEEE history. ROV ISO-Squid placed 6th overall in the explorer class of the mate competition, and the team cannot wait to build upon the lessons learned in the upcoming season!

2021 - 2022: ROV Sub-Optimal
Purdue ROV competed in Long Beach, CA at the 20th MATE World Championship. After arriving and reassembling the vehicle, the team rushed to repair the electronics stack after the hotel was struck by lightning (yes, really). With some Arduinos bought nearby, the team was able to rewrite new communications code from scratch in just two days, effectively replacing the functionality of the ESC interface boards that had stopped communicating properly. The essential repairs were completed just in time for the last mission run. Overall, the team placed 10th internationally and 2nd in the engineering technical presentation!
The design for ROV Sub-Optimal included numerous innovations, including consolidated power and logic electronics in a single enclosure, improved claw geometries, new cameras with even more streaming bandwidth, and a radically changed thruster layout. The team looks forward to expanding even more on the next vehicle's capability under the captaincy of Peter Salisbury.

2020-2021: ROV Triton
Purdue ROV competed in Johnson City, TN at the East Tennessee State University from August 5th to August 7th. The team achieved 4th place in the Explorer category and won the Aloha Team Spirit Award. ROV Triton performed admirably at competition, piloting smoothly for both mission runs and the bonus. ROV Triton introduced numerous improvements: the integrated thruster ducts; modular foam and ballst system; a quick sealing logic tube; a resin printed solenoid manifold; a single box for power electronics providing ultimate accessibility, sealing, and thermal properties, hot swappable ESCs and controllers for them; ESC and power brick data; higher current output; ultra low latency camera streams; a more robust ROS network; and a modular front end. The team is very proud of its achievements and is excited to see what can be done in the upcoming season as Katherine Sandys takes over as the sixth captain of the team.

2019-2020: ROV X12
The 2019-2020 season marked an exciting and bustling new season for the team. The team experienced its fourth change in captaincy with Grant Geyer heading the team. Also new are many of the leads for the technical teams. The team pursued many new designs and approaches toward making X12, in addition to several refinements from ROV Remora. The R&D department found new ethernet cameras that were more reliable and PoE compatible for a nearly independent camera system. The major mechanical improvements include a faster and effective method of using a ring clamp to seal the logic electronics tube and the use of 3D prints to house thrusters and to provide buoyancy in conjuntion with expanding marine foam. With the suspension of all Purdue activities and the cancellation of the MATE competition, the team is now working at a very limited capacity to prepare ROV X12 for a pool test when available. The team is excited to see its hard work come to completion when normal activities resume.

2018-2019: ROV Remora
The year 2019 marked an improvement for the team, with many leaders returning to their positions. The team improved 5 places to finish 13th at the competition and had the second best technical report. The team maintained a similar size of students. In 2019, the competition was hosted in Kingsport, TN by Eastman. The team aimed for an ambitious design, changing the tools system to use pneumatics, the electrical system to CAN and ethernet cameras, and the software system to Robot Operating System. These switches made ROV Remora more robust, but delayed testing and made integration more difficult. The team is very proud of its achievements and excited to see where the upcoming season goes under the new leadership.

2017-2018: ROV Cetacean
The team faced its third change in captaincy, with Alex Ruffino taking over. The team kept its large size, with more than 50 people working on the project over the year. The competition moved to Seattle this year, and the team brought with them a strong technical report and presentation. Technical issues with the electronics prevented the team from reaching its full potential, but they kept trying to make the ROV function properly at both mission runs and the bonus point run. The team finished 18th out of 28, and was awarded the Guts and Glory award for overcoming technical hardship with resolve. The team is proud of their achievements, and looks forward to the upcoming season!
2016-2017: ROV Cephalopoa
Purdue ROV competed in Long Beach, CA from June 23 - 25. The team continued its trend of increasing results and growing in size. The 50-member team finished in 8th place and took home first in both the technical documentation and the product presentation. Furthermore, Katherine Mao won the Flying Fish award for her technical designs and passion for the field. ROV Cephalopod performed well; however, a loose cable connection during the final product run prevented a shot at first place. Regardless, the team was thrilled with their success and are proud of one of their most advanced and capable vehicles to date!
